Construction is significantly behind other UK sectors in productivity, speed, human safety, environmental sustainability and quality. In addition to inadequate building supply and affordability in the UK, humanitarian demand and economic opportunity for construction is set to increase substantially with global population growth over the next 40 years. However, with an aging work-force and construction considered to be one of the most dangerous working environments, the industry needs to explore radically new approaches to address these imminent challenges. While increased off-site manufacturing provides a partial solution, its methods are not easy to automate. Where individual mass-produced parts can be moved efficiently through production assembly lines that separate workers from dangerous machinery, building manufacturing involves mass-customisation or one-off production at a larger scale. This requires machinery and people to move around, and potentially work inside of a fixed manufacturing job e.g. a prefabricated or on-site house, as various independent and parallel tasks are undertaken in safety-compromised, overlapping work-zones. To address these issues, this project investigates fundamentally new operational and delivery strategy for automation to offer new ways of working with robots.
To address construction relevant challenges, we will integrate capabilities for additive manufacturing, manipulation and assembly for building and building-component scale manufacture, in addition to computational means for individual robots to make local decisions. The final research deliverable will be the demonstration of a collective multi-robot building manufacturing system that can autonomously build parts such as a façade or roof, assemble a structure, or construct a freeform building pavilion. We will also integrate these technologies within prototype building systems themselves, to create a new type of 'active' building that can use a multi-agent system to self-regulate energy and harvest data to provide a closed operational ecology between design, manufacturing, construction and building use, revolutionizing the way we manufacture, operate and use buildings. Further, evaluation frameworks will be developed to assess multi-robot construction and obtain objective measures for collective systems to deliver greater resource efficiency, quality, speed, safety and up-time compared with established construction methods. In doing so, we will establish new metrics quantifying the impact of these technologies from both economic and environmental perspectives.
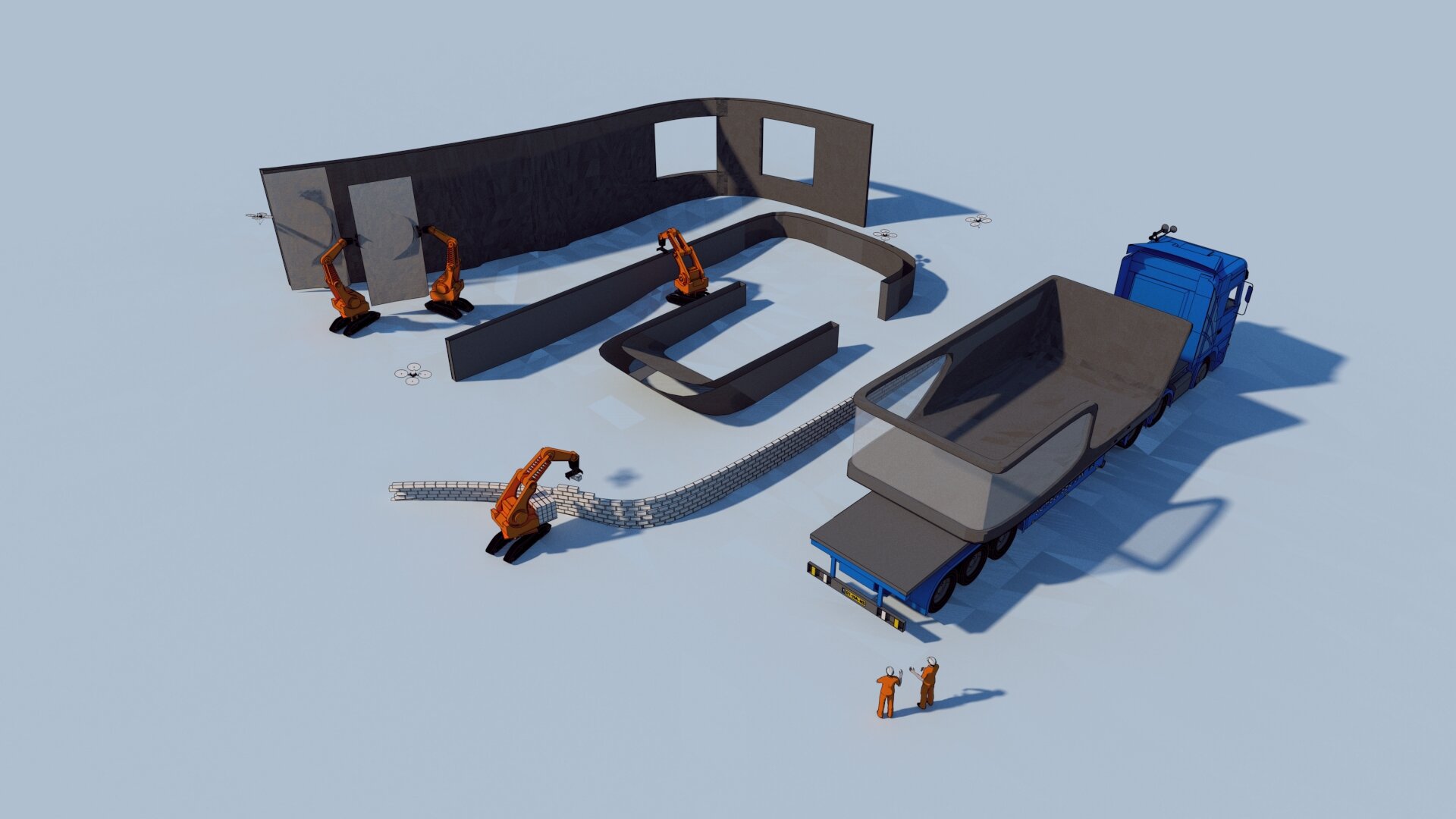
Applied Off-site and On-site Collective Multi-Robot Autonomous Building Manufacturing
Lead investigators:
Robert Stuart-Smith (University College London)
Dr Vijay M. Pawar (University College London)
Prof Jacqui Glass (University College London)
Prof Mirko Kovac (Imperial College London)